Linux UIO driver to handle with IRQ source.
Published at February 24, 2020 · Last Modified at December 23, 2021 · 6 min read · Tags: linux kernel rt
Linux UIO driver to handle with IRQ source.
Published at February 24, 2020 · Last Modified at December 23, 2021 · 6 min read · Tags: linux kernel rt
The Userspace I/O framework (UIO) is part of the Linux kernel and allows device drivers to be written almost entirely in userspace. UIO is suitable for hardware that does not fit into other kernel subsystems (Like special HW like FPGA) and allowing the programmer to write most of the driver in userspace using all standard application programming tools and libraries. This greatly simplifies the development, maintenance, and distribution of device drivers for this kind of hardware. I did a simple project implemented on Xilinx Zynq that shows a response to IRQ that comes from a periodic time that is implemented on the FPGA part of the Zynq. The PL side (ARM) responds to the IRQ at user space and allows a rapid periodic response to IRQ. It can view the project here.
Here is a simple FPGA project made on Vivado. It has an ARM processor, GPIO, and Fixed interval timer (FIT). The user can enable or disable the FIT by setting the correct bit in the GPIO register.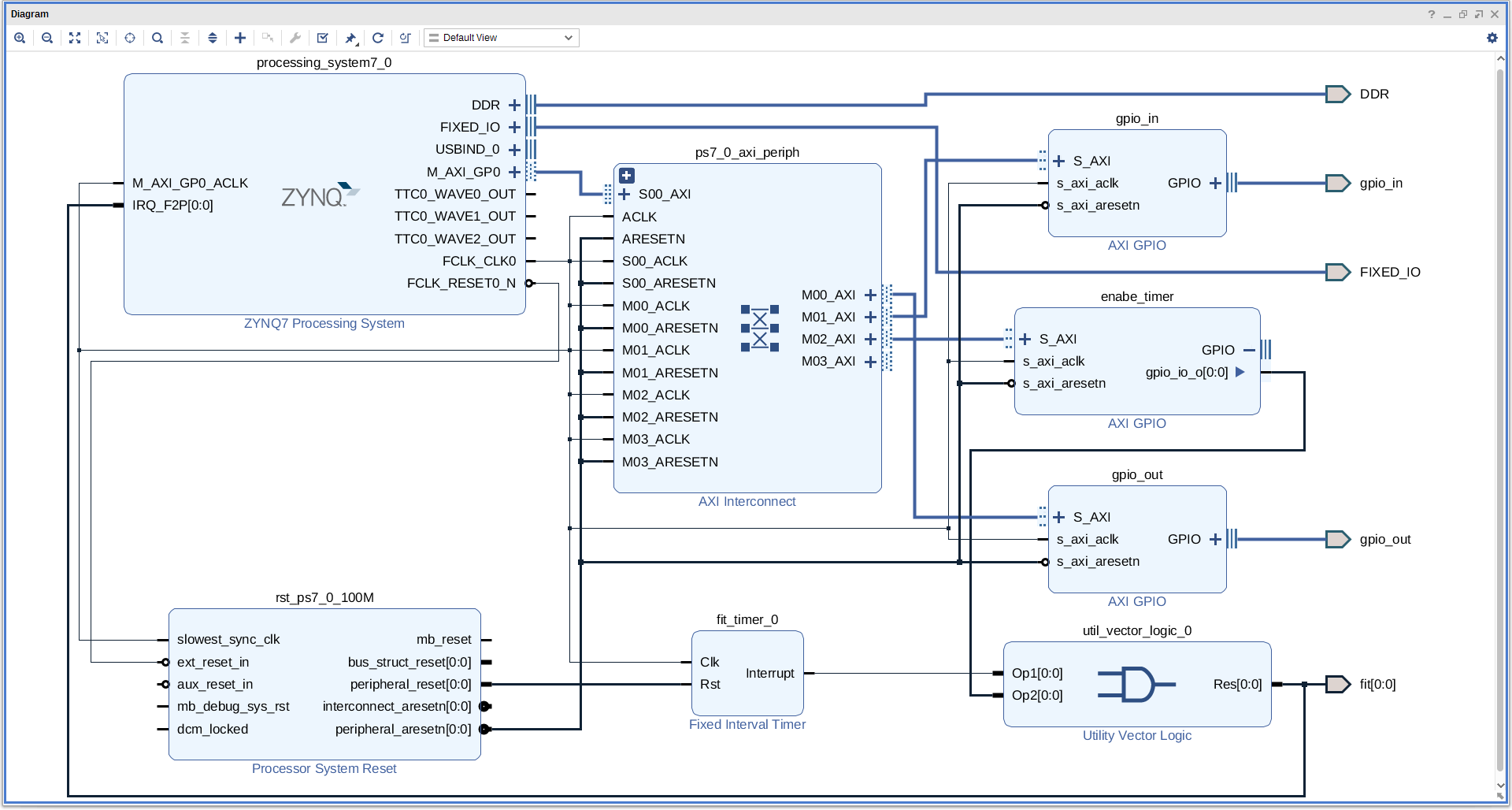
The Block Design
The IRQ output of the FIT is is connected to the ARM interrupt at IRQ_F2P[0]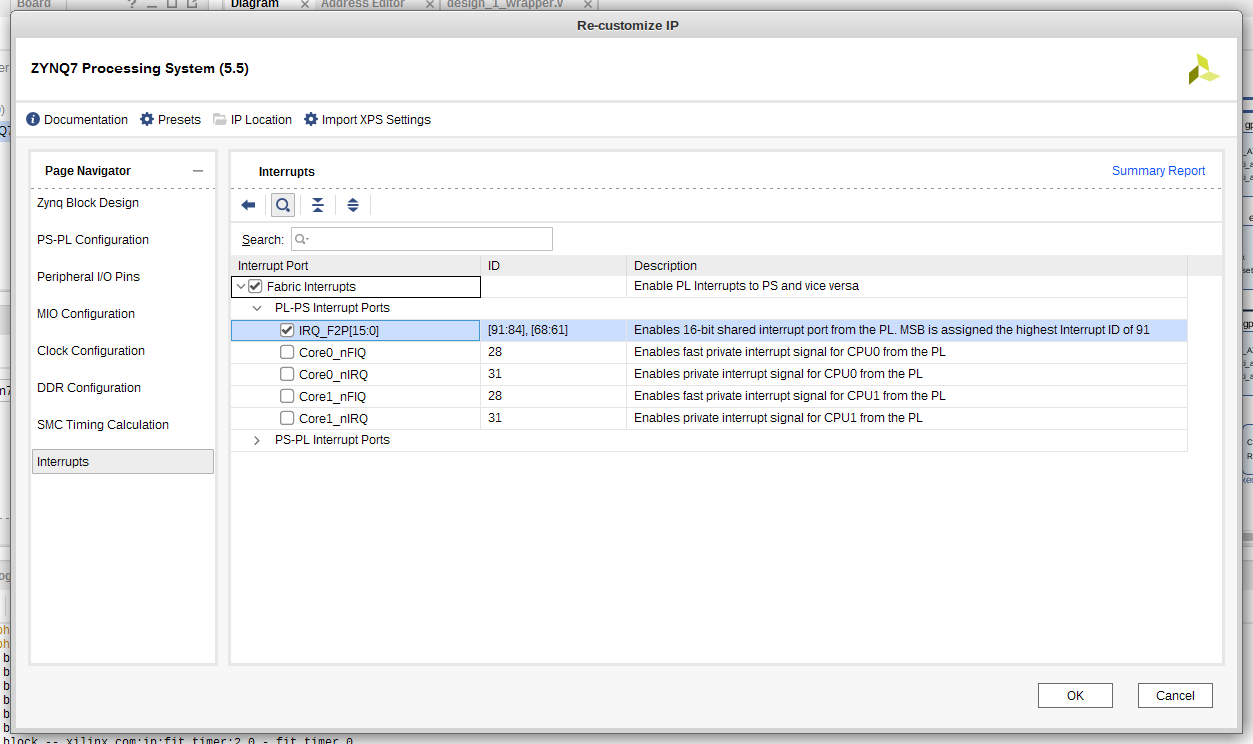
IRQ Selection
here is the driver code:
#include <linux/module.h>
#include <linux/slab.h>
#include <linux/device.h>
#include <linux/uio_driver.h>
#include <linux/interrupt.h>
#include <linux/of_address.h>
#include <linux/of_irq.h>
#include <linux/of_platform.h>
static struct uio_info *info;
static struct device *dev;
static int irq = 6;
module_param(irq, int, S_IRUGO);
static void my_release(struct device *dev)
{
pr_info("releasing my uio device\n");
}
static irqreturn_t my_handler(int irq, struct uio_info *dev_info)
{
// static int count = 0;
// pr_info("In UIO handler, count=%d\n", ++count);
return IRQ_HANDLED;
}
#define DEVNAME "fpga-uio"
static int __init my_init(void)
{
struct device_node * np = NULL;
/* set IRQ */
np = of_find_compatible_node(NULL,NULL,DEVNAME);
if (np == NULL)
{
printk (KERN_INFO "node %s is not defined in DTS\n",DEVNAME );
return 0;
}
irq = irq_of_parse_and_map(np, 0); /* get IRQ # from device tree */
dev = kzalloc(sizeof(struct device), GFP_KERNEL);
dev_set_name(dev,DEVNAME);
dev->release = my_release;
#pragma GCC diagnostic push
#pragma GCC diagnostic ignored "-Wunused-result"
(void)device_register(dev);
#pragma GCC diagnostic pop
info = kzalloc(sizeof(struct uio_info), GFP_KERNEL);
info->name = DEVNAME;
info->version = "0.0.1";
info->irq = irq;
info->irq_flags = IRQF_SHARED;
info->handler = my_handler;
if (uio_register_device(dev, info) < 0) {
device_unregister(dev);
kfree(dev);
kfree(info);
pr_info("Failing to register uio device\n");
return -1;
}
pr_info("Registered UIO handler for IRQ=%d\n", irq);
return 0;
}
static void __exit my_exit(void)
{
uio_unregister_device(info);
device_unregister(dev);
pr_info("Un-Registered UIO handler for IRQ=%d\n", irq);
kfree(info);
kfree(dev);
}
module_init(my_init);
module_exit(my_exit);
MODULE_AUTHOR("Yair Gadelov");
MODULE_DESCRIPTION("axi gpio for zynq");
MODULE_LICENSE("GPL v2");
makefile to build:
obj-m := uiofpga.o
SRC := $(shell pwd)
all:
$(MAKE) -C $(KERNEL_SRC) M=$(SRC)
modules_install:
$(MAKE) -C $(KERNEL_SRC) M=$(SRC) modules_install
clean:
rm -f *.o *~ core .depend .*.cmd *.ko *.mod.c
rm -f Module.markers Module.symvers modules.order
rm -rf .tmp_versions Modules.symvers
/ {
...
fit_uio:fit {
status = "okay";
compatible = "fix-interval-timer-irq";
interrupt-parent = <&intc>;
interrupts = <0 29 1>;
};
...
}
Here is what the three numbers assigned to “interrupt" means:
The first value is a flag indicating if the interrupt is an SPI (shared peripheral interrupt). A nonzero value means it is an SPI.
The second number relates to the IRQ number. For Shared Peripheral interrupts, the value in the device tree is the (IRQ - 32), e.g., subtract 32 from the 61 number. See Chapter 7, table 7.4 of the Zynq tech ref manual (ug-585) to understand the interrupt numbers. I guess it because the first bit of SPI ( Shared Peripheral Interrupts) is mapped to IRQ 32. I mapped the FIT to 61 (32+29) - The first bit among the 16 bits of the shared interrupt port from the PL. Here is a quote from UG-585 P. 229:
A group of approximately 60 interrupts from various modules can be routed to one or both of the CPUs or the PL. The interrupt controller manages the prioritization and reception of these interrupts for the CPUs. Except for IRQ #61 through #68 and #84 through #91, all interrupt sensitivity types are fixed by the requesting sources and cannot be changed. The GIC must be programmed to accommodate this. The boot ROM does not program these registers; therefore, the SDK device drivers must program the GIC to accommodate these sensitivity types.
Here is a demo of how to receive and respond to interrupts from the FIT in userspace. I have configured the FIT to interrupt every 61 microseconds, and most of the time, it defiantly looks accurate.
61.000000 61.000000 61.000000 61.000000 63.000000 60.000000 61.000000 60.000000 61.000000 88.000000 37.000000 60.000000 60.000000 61.000000 61.000000 61.000000 62.000000 60.000000 61.000000 61.000000 61.000000 63.000000 60.000000 61.000000 60.000000 61.000000 61.000000 61.000000 61.000000 62.000000 61.000000 61.000000 61.000000 60.000000 62.000000 60.000000 62.000000 61.000000 63.000000 59.000000 61.000000 61.000000 61.000000 61.000000 61.000000 61.000000 61.000000 61.000000 61.000000 61.000000 61.000000 61.000000 61.000000 61.000000 62.000000 62.000000 60.000000 60.000000 62.000000 63.000000 59.000000
int fd;
int trigger_init(void)
{
fd=open("/dev/uio0",O_RDONLY);
if (fd<0) {
return -1;
}
return 0;
}
int trigger_poll(void)
{
int info = 1,nb; /* unmask */
struct pollfd fds = {
.fd = fd,
.events = POLLIN,
};
int ret = poll(&fds, 1, 100);
if (ret >= 1) {
nb = read(fd, &info, sizeof(info));
if (0 && nb == (ssize_t)sizeof(info)) {
/* Do something in response to the interrupt. */
printf("Interrupt #%u!\n", info);
}
} else {
info = -1;
close(fd);
}
return info;
}
The number of interrupt occurrence can be displayed by typing cat /proc/interrupts
CPU0 CPU1
16: 1 0 GIC-0 27 Edge gt
17: 0 0 GIC-0 43 Level ttc_clockevent
18: 617543 758201 GIC-0 29 Edge twd
19: 0 0 GIC-0 37 Level arm-pmu
20: 0 0 GIC-0 38 Level arm-pmu
21: 43 0 GIC-0 39 Level f8007100.adc
24: 0 0 GIC-0 35 Level f800c000.ocmc
25: 397 0 GIC-0 82 Level xuartps
26: 397868 0 GIC-0 54 Level eth0
27: 0 0 GIC-0 45 Level f8003000.dmac
28: 0 0 GIC-0 46 Level f8003000.dmac
29: 0 0 GIC-0 47 Level f8003000.dmac
30: 0 0 GIC-0 48 Level f8003000.dmac
31: 0 0 GIC-0 49 Level f8003000.dmac
32: 0 0 GIC-0 72 Level f8003000.dmac
33: 0 0 GIC-0 73 Level f8003000.dmac
34: 0 0 GIC-0 74 Level f8003000.dmac
35: 0 0 GIC-0 75 Level f8003000.dmac
36: 0 0 GIC-0 40 Level f8007000.devcfg
42: 0 0 GIC-0 41 Edge f8005000.watchdog
43: 3478435 0 GIC-0 61 Edge fix-intervel-timer-irq <-- The number of FIT interrupts occurances
[1] https://www.kernel.org/doc/html/v4.13/driver-api/uio-howto.html
[2] http://fpga.org/2013/05/28/how-to-design-and-access-a-memory-mapped-device-part-two
[3] https://elinux.org/images/b/b0/Uio080417celfelc08.pdf
[4] https://www.osadl.org/fileadmin/dam/rtlws/12/Koch.pdf
[5] https://www.kernel.org/doc/html/v4.14/driver-api/uio-howto.html
[6] https://www.xilinx.com/support/answers/62363.html
[7] https://yurovsky.github.io/2014/10/10/linux-uio-gpio-interrupt.html
[8] https://www.slideshare.net/chrissimmonds/quick-and-easy-device-drivers-for-embedded-linux-using-uio